graphics-snippets

Intersection
<hr/>
Intersection of 2 lines (2 dimensional)
Related questions
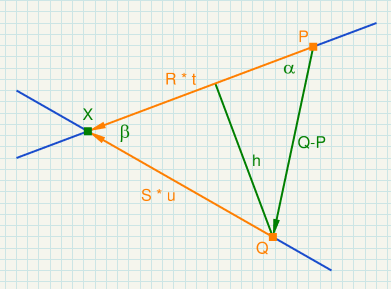
P ... point on the 1. line
R ... direction vector of the 1. line
Q ... point on the 2. line
S ... direction vector of the 2. line
alpha ... angle between Q-P and R
beta ... angle between R and S
X ... intersection point
t ... distance between P and X
u ... distance between Q and X
gamma = 180° - alpha - beta
t = | Q - P | * sin(gamma) / sin(beta)
u = | Q - P | * sin(alpha) / sin(beta)
t = dot(Q-P, (S.y, -S.x)) / dot(R, (S.y, -S.x)) = determinant(mat2(Q-P, S)) / determinant(mat2(R, S))
u = dot(Q-P, (R.y, -R.x)) / dot(R, (S.y, -S.x)) = determinant(mat2(Q-P, R)) / determinant(mat2(R, S))
X = P + R * t = Q + S * u
<hr/>
Intersection of a line and a plane
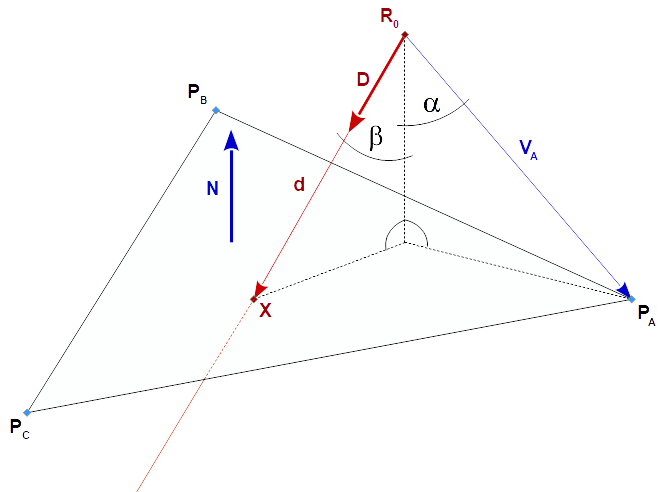
The ray is defined by a point R0 and a direction D.
The plane is defined by a triangle with the three points PA, PB, and PC.
The normal vector of the plane can be calculated by the cross product of 2 legs of the triangle:
N = cross(PC-PA, PB-PA)
The normal distance n of the point R0 to the plane is:
n = | R0 - PA | * cos(alpha) = dot(PA - R0, N)
It follows that the distance d of the intersection point X to the origin of the ray R0 is:
d = n / cos(beta) = n / dot(D, N)
The intersection point X is:
X = R0 + D * d = R0 + D * dot(PA - R0, N) / dot(D, N)
Intersection of the Line of Sight and the Viewport
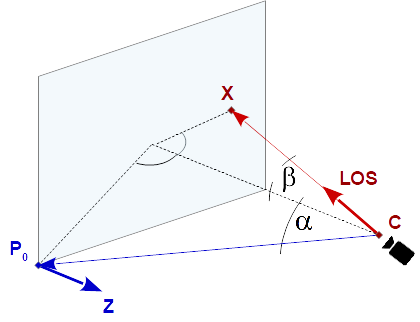
P0 ... any known point on the viewport
Z ... Z-axis of the viewport
C ... camera position
LOS ... line of sight
X = C + LOS * dot(P0 - C, Z) / dot(LOS, Z)